9.1.1 Pyslvs基本操作
简介
Pyslvs是一个开源的平面联动机构仿真和机械合成系统,它的名字来自“Python”和“Solvers”。简单来说,这是一个简单的2D连杆机构运动仿真界面。有很多其他的软件可以实现运动仿真,比如建模软件Solidworks以及多体动力学仿真软件Adams。区别在于,这款软件构建的连杆机构仅仅是简图,而非实体,可以节约时间。界面中设置完Joints和Links后可以通过手动拖动或者设置马达驱动以观察输出点在平面中形成的曲线。
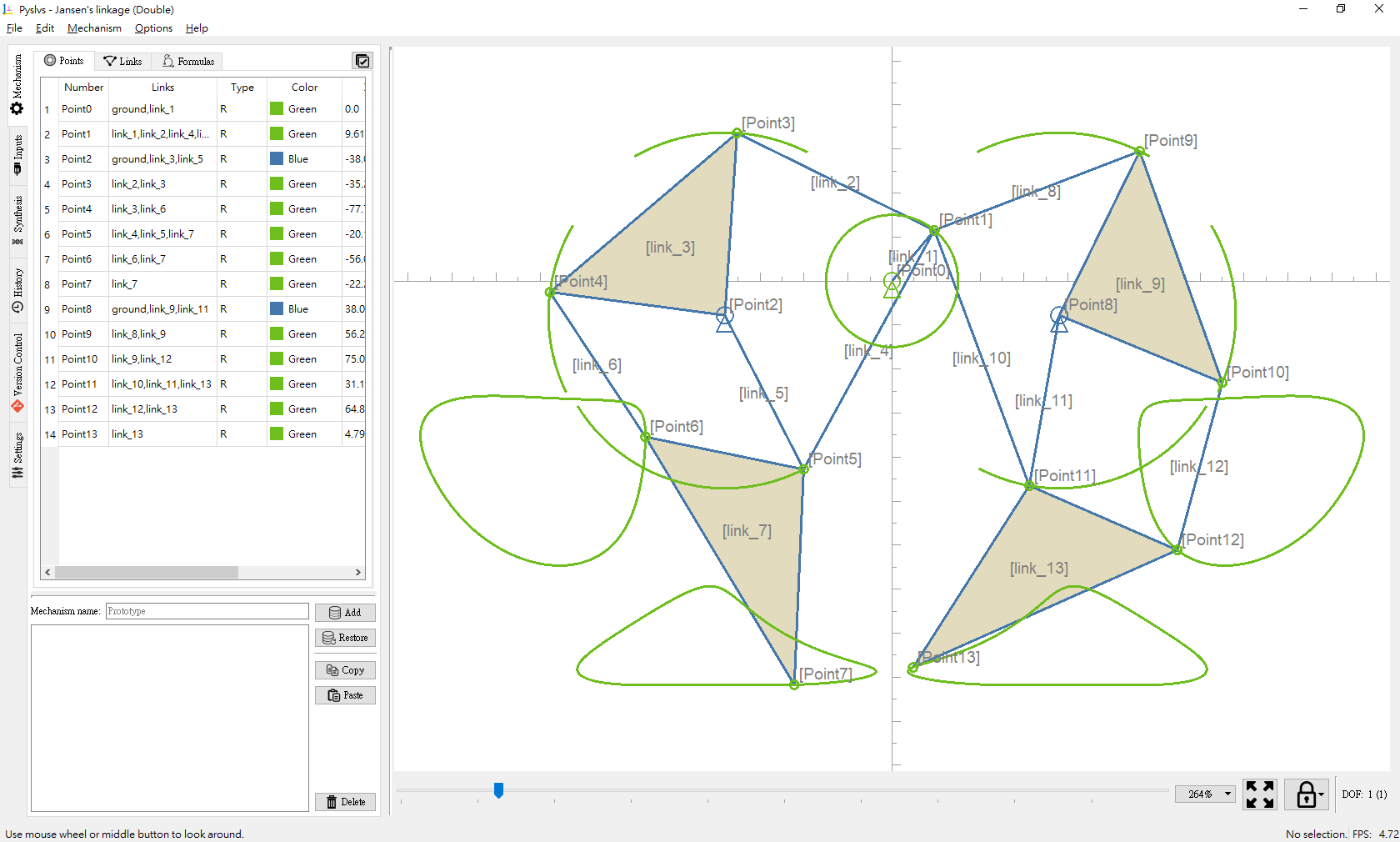
PMKS仿真软件界面
官方文档:https://pyslvs-ui.readthedocs.io/en/latest/
Pyslvs参考了俄勒冈州州立大学Matthew I. Campbell的项目PMKS(Planar Mechanism Kinematic Simulator)。
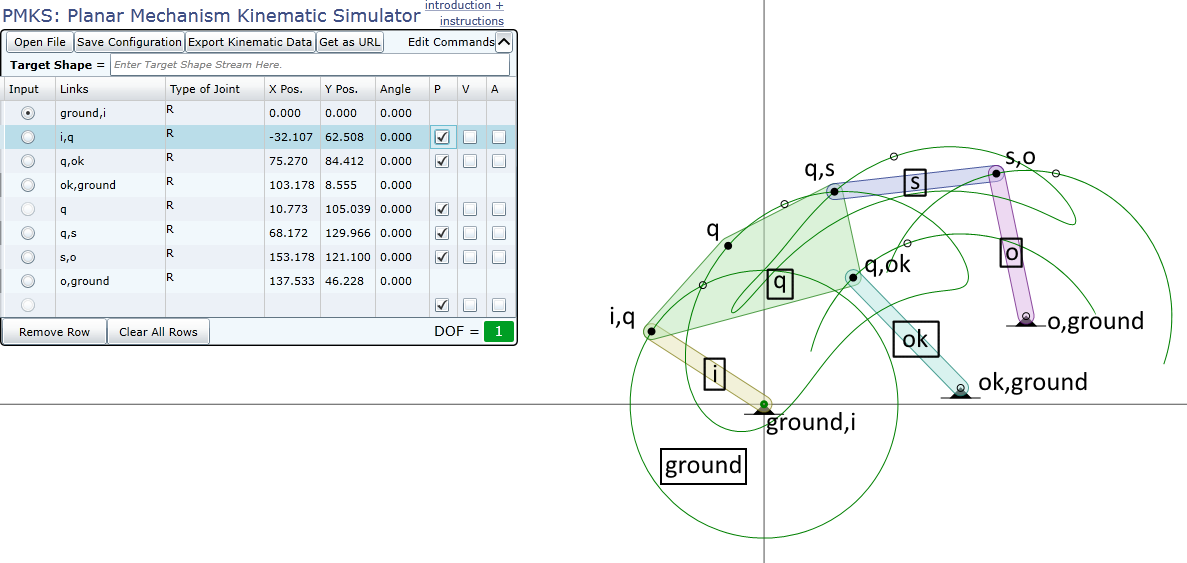
PMKS仿真软件界面
软件界面
Mechanism界面
-
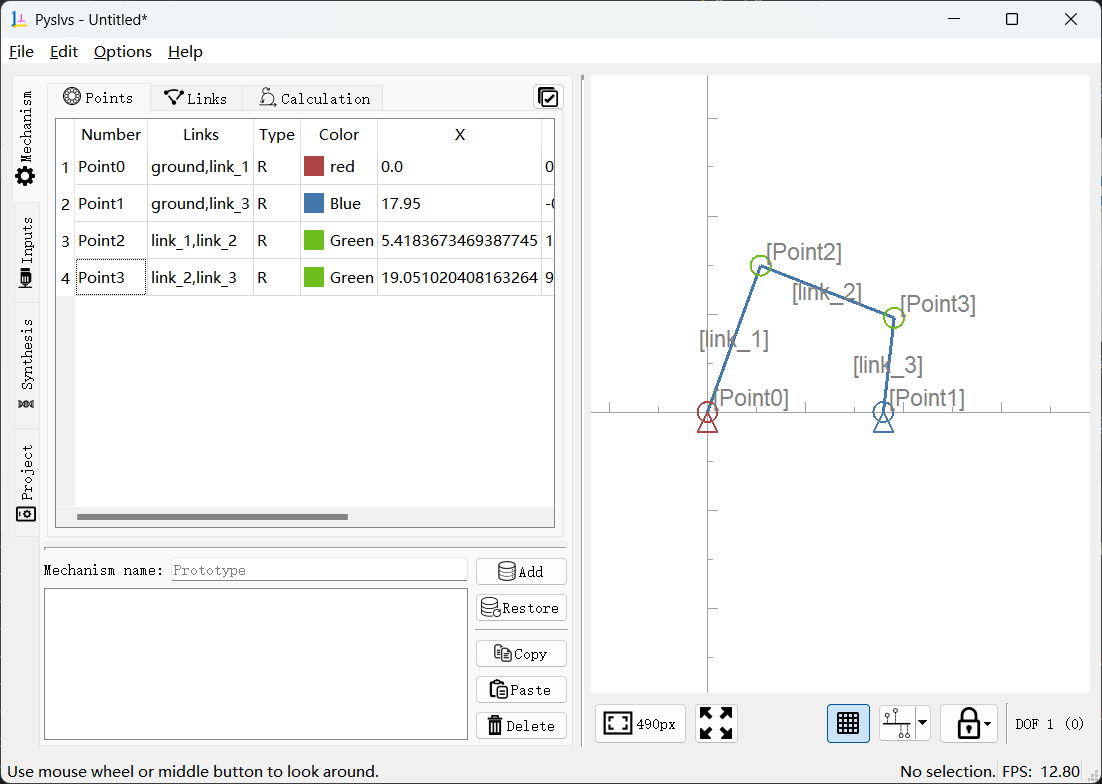
Mechanism界面:可设置运动副坐标(JoInts)位置,运动副是否接地(固连至机架)。框选运动副可设置连杆(Links)。这是机构简图绘制的主界面;
-
Inputs界面:可以设置原动件,观察输出点轨迹,获取输出点位置速度图像;
-
Synthesis界面:用于机构综合,帮助用户重建机构;
-
Project界面:用于设置保存路径以及另存为其他格式。
基本操作
Step1: 建立运动副和连杆。运动副可设置是否grounded(固连机架)。
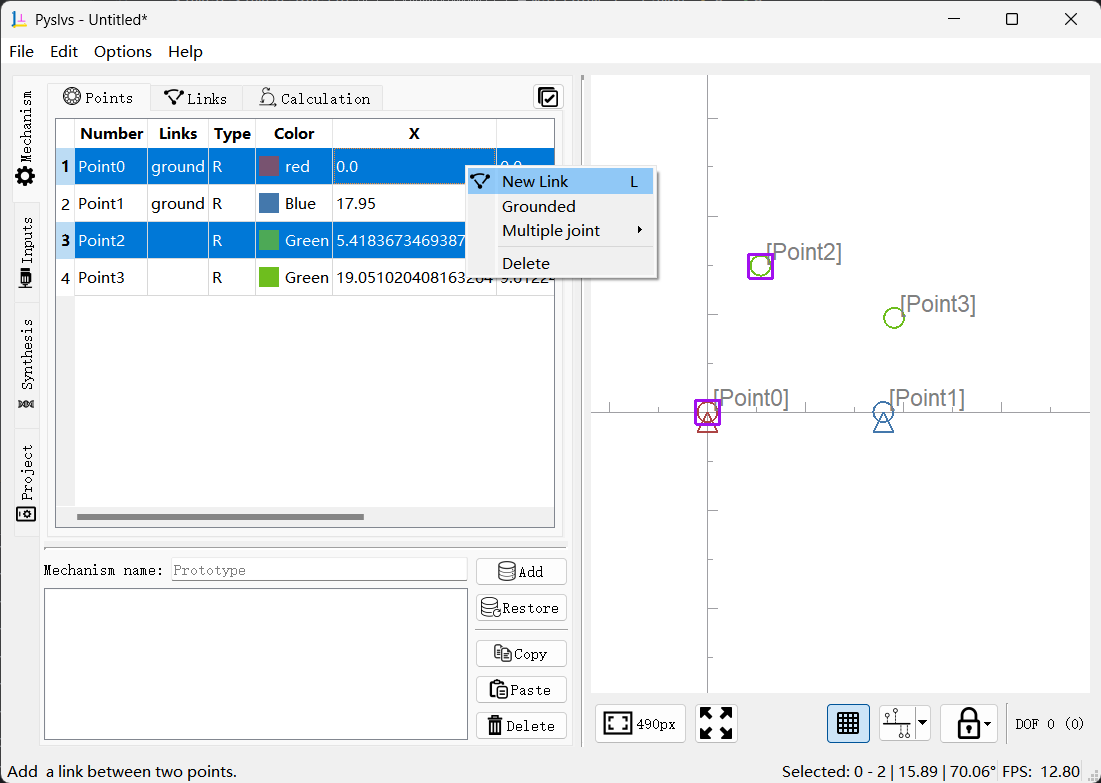
建立运动副,设置连杆
Step2: 设置机构输入(原动件)可观察原动件和输出的运动轨迹。
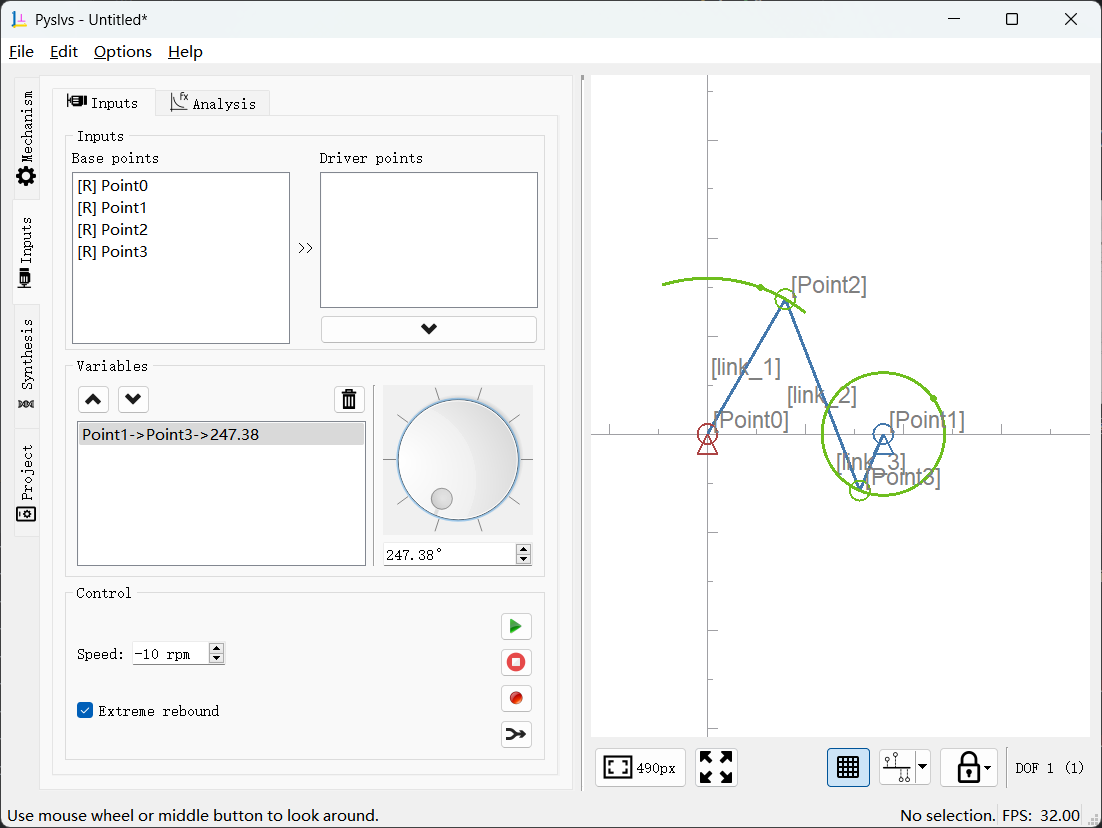
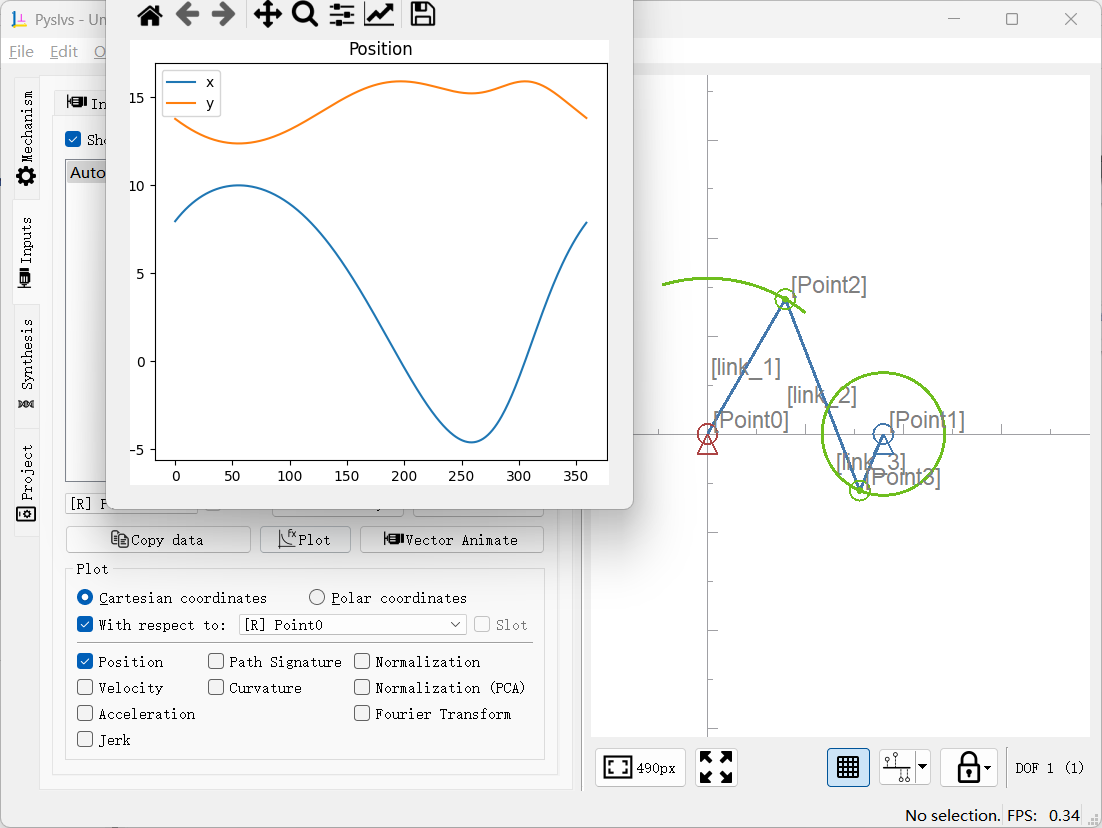
设置原动件,观察输出轨迹以及位置、速度曲线