1.2.5 其他有趣的机器人
机器人涵盖的范围非常广泛,除了我们能在日常生活中见到的已经产品化的机器人、在各种展会上参观到的工业应用机器人,还有我们不常见到单应用在各种特殊领域的机器人。此外,还有很多机器人仍然没有走出实验室,但是依旧具备改变我们未来生活的潜力。有些机器人看上去似乎和我们的生活并没有太大关系,但是作为控制理论和各种自主导航算法的实验平台,仍然具有很高的科研价值。
从仿生谈起
仿生是一个非常古老的工程方法,从机械工程、材料到信息科学再到建筑与工业设计领域,大自然为我们提供了无穷无尽的灵感。举个最简单的例子,从达芬奇的扑翼机,再到后来现代飞行器的发展,鸟类一直是工程师的老师。仿生有何意义?从其他生物上找到自然进化赋予其独特的优势,将这些特征或特征演化出的原理利用到机器人身上,可以大大改进、扩展机器人的运动模式与操作模式。

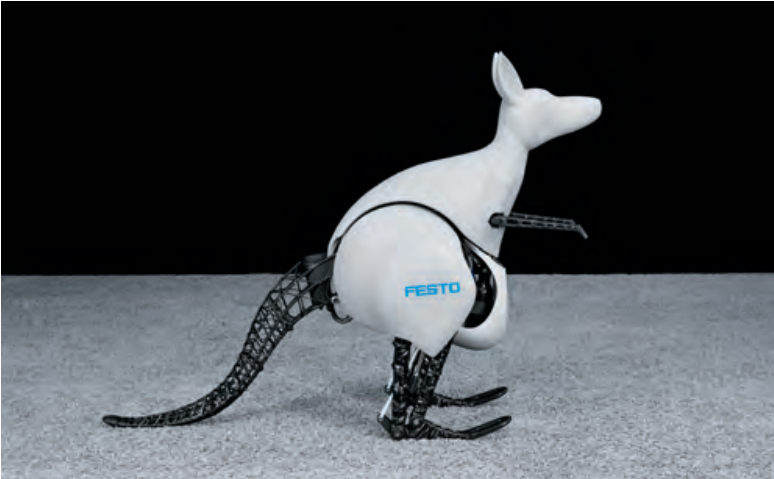
Festo的仿生袋鼠
运动模式(Locomotion)
在机器人的仿生工程案例当中,运动模式的改变是最为明显的。研究生物的各种运动模式,可以弥补现有运动模式的缺点。有的改进能够节约能量,有的改进能够提高适应性,有的能够为小尺度应用提供更高效的方案。
有了最高效的轮子,腿足还有意义吗?从轮子到腿,再到毛毛虫与蛇的爬行、尺蠖的伸缩,甚至是壁虎的攀爬与跳蚤的跳跃,陆地上机器人对非结构化地面的适应性得到了提高,同时也具备了离开地面爬上树木与墙壁的能力。在水下,从高效的螺旋桨,到鱼的尾鳍游动助推、水母和乌贼的喷射反推、海扁虫的波浪鳍游动,机器人与自然安全、和谐交互的能力得到了提升,从而为我们探索海洋生物以及整个生态环境提供了便捷。

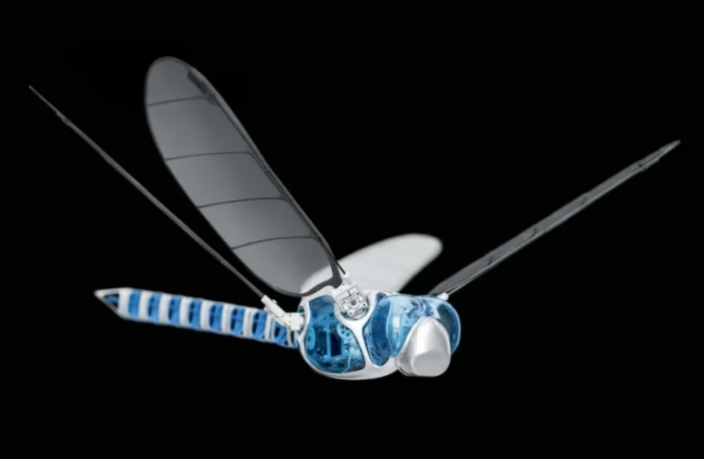
Festo的仿生鳐鱼和蜻蜓
当然,人类创造在某些方面也会偏离自然演化的方向,超越自然演化的局限性。机器人中很多的结构布局、机械传动还是得依靠人类历史上的发明,轮子、螺旋桨、齿轮等人类智慧的结晶加上仿生工程带来的灵感,也能够碰撞出兼具性能与美学的机器人创造。下面给大家简单介绍几种仿生机器人。
水下机器人与机器鱼
水下机器人长期以来依然被作为特种机器人看待,毫无疑问,水下环境对机器人结构密封抗压的能力提出了要求,而且运动时较大的流体粘滞阻力给运动控制带来了一些麻烦。空气中的无人机四旋翼构型下可以非常灵活地实现各个方向的运动,而我们经常能够看到冗余驱动的水下机器人拥有六个到八个推进器的布置,这就是为了在复杂水下环境中保持稳定。

EBX)F7HBIPJF%5B%25%5D7O5Q.png)
常见的水下机器人
水下机器人通常完成的任务包括:海产品等物件的打捞抓取、搜救查找以及物种生态调查和水下摄影。机器鱼作为一种特殊的仿生机器人,可以完美辅助生物学家完成海洋生物生态研究的工作。
仿生壁虎与攀爬类机器人
蠕动与爬行
YT29%25%25WZQ.png)
H0CDD3QQ%24CLZE5.png)
爬行机器人
跳跃机器人
一种叫做galago的哺乳动物——婴猴,有一种独特的适应能力,称为功率调制,使他们能够在肌腱中快速积累和储存能量,然后迅速释放能量,以比肌肉单独所能做的强15倍的飞跃离开地面。加州大学伯克利分校的研究人员由此汲取灵感,发明了垂直跳跃机器人Salto。相比动物,机器人具备的是弹簧而不是肌腱。它还有一个尾巴,可以上下移动以在空中调整身体,这是从阿加玛蜥蜴那里借来的技巧。

MHFU.png)
跳跃机器人Salto
Biomimetic Millisystems Lab, Berkley University of California
无人机栖附
仿生机器鱼或毛毛虫或象鼻是整机的对动物个体或部分的模仿,而有的仿生学并不体现在整个机器人身上,而是能够改进原形态机械/机器人身上某一个位置的执行效果。一个典型的例子就是无人机模仿鸟类的栖附,相比在原位置悬停,可以起到节能的作用。
斯坦福大学开发的这款类鸟爪的机构,可以动态栖息在复杂的表面上并抓取不规则的物体。为了适应高速碰撞,机器人的两条腿被动地将冲击能量转化为抓握力,而欠致动的抓取机构可在不到50毫秒的时间内包裹不规则形状的物体。

Stanford的类鸟栖附机器人
W. R. T. Roderick et al. ,Bird-inspired dynamic grasping and perching in arboreal environments.Sci. Robot.6,eabj7562(2021).DOI:10.1126/scirobotics.abj7562
文章已是Open Access状态: https://www.science.org/doi/10.1126/scirobotics.abj7562
仿生鸵鸟下肢
通过模仿鸵鸟的步态可以实现更少的能量消耗。尽管体重超过100公斤,鸵鸟奔跑时最快依然能达到55km/h的惊人时速。鸵鸟奔跑步态的一个显著特征是离地后足部的向后折叠,这被归结为机械耦合。马普所的这款仿生鸵鸟BirdBot下肢通过线驱将腿部关节移动到上方,且足部折叠为被动自由度,由弹簧提供欠驱动的自由度约束。
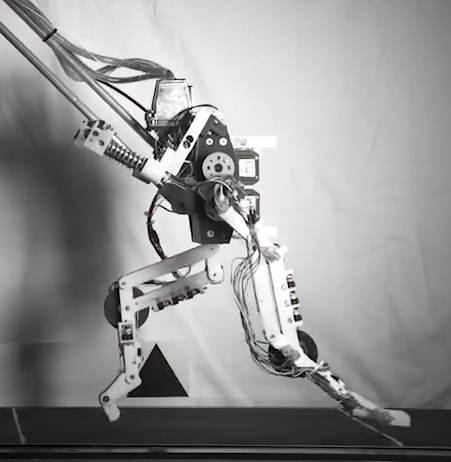
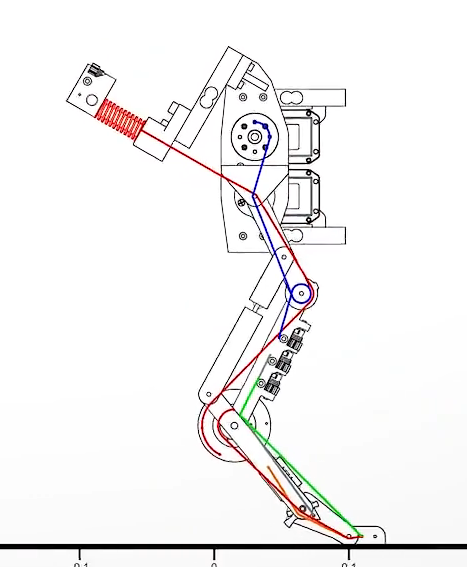
仿生鸵鸟下肢
腿部机器人的高能耗来源包括站立时支撑机器人质量所需的负载以及站立和摆动阶段之间腿部状态的切换。BirdBot克服了关节对快速反馈控制的依赖,并用机械耦合结构取代了主动控制,不仅提高了运动速度,还大大减少了能量消耗(实验验证了,与之前使用平行弹性腿弹簧的步行机器人相比,鸵鸟腿只消耗1/4的能量)。
Alexander Badri-Spröwitz et al. ,BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching.Sci. Robot.7,eabg4055(2022).DOI:10.1126/scirobotics.abg4055
文章已是Open Access状态: https://www.science.org/doi/10.1126/scirobotics.abg4055