1.2.2 机械臂
简介
机械臂是最早应用于制造业且用途最为广泛的一类机器人,工业应用的机械臂又称为工业机器人。世界知名的四大工业机器人厂商分别是ABB、KUKA(库卡)、FANUC(发那科)和YASKAWA(安川)。其最常见的六轴关节型机器人广泛应用于物料搬运、机器上下料、点焊、弧焊、切割、装配、测试、检测、涂胶、研磨和抛光。在汽车制造业尤为典型,除了焊接、上下料工作,工业机器人还负责对人体有毒害的喷涂工作。
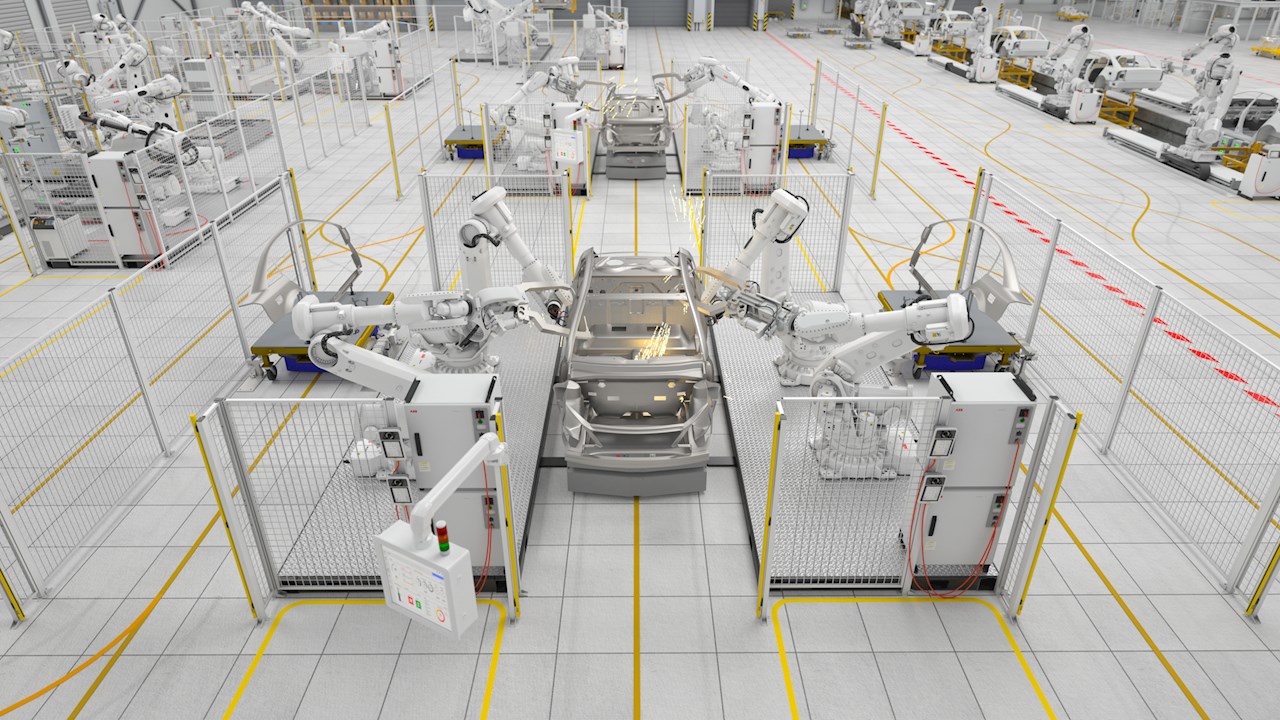
汽车制造流水线上的工业机械臂(来源:ABB)
因为机械臂的通用性,机器人学教材基本上都会以机械臂为例,做运动学正逆解分析、动力学分析以及末端轨迹规划控制。

用于弧焊的安川MOTOMAN-AR1440(来源:yaskawa)
除了工业生产中的大型机械臂,还有一种面向更贴近生活场景的小型小负载机械臂,即所谓的协作机器人。无论是在咖啡馆中拉花,还是在理疗馆中进行推拿按摩,它都可以根据需求改变自己的工作技能。很多应用得益于协作机器人优秀的人机交互设计以及精准的力控性能。

Universal-Robot,KUKA iiwa,Schunk Lightweight Arm
类型
在机器人发展过程中,除了这种最常见的六个转动自由度的机械臂,还有其他的构型。例如,有些机器人拥有更少的自由度,有些机器人的某些关节是移动副(例如SCARA机器人的RPRR构型);甚至有的机器人不是串联构型,而是并联构型(例如Delta机器人)。


SCARA机械臂与Delta机械臂
SCARA虽然自由度更少,但是可以面向适合它且较为简单的生产任务,不仅速度快,还能够大大降低成本。Delta机器人在1980年代初期被开发的目的是要以非常快的速度处理小型且轻的物体,虽然其成本更高,但是能够实现又快又准的效果。并联构型的高速特性在包装产业、医疗及制药业都有很好的应用,由于其刚性优秀,Delta机器人也可以用在手术中。其他的应用包括在无尘室中针对电子零件的高精度组装。Delta构型近些年来也被用在3D打印领域,如三角洲打印机。
控制方法
基本控制框架
graph LR
A[任务决策] --> B[轨迹规划];
B-->|笛卡尔空间位置&速度| C[逆运动学];
C-->|各轴空间角速度&角加速度| D[关节PID控制];
D--> E[电机FOC控制]
稚晖君的桌面机械臂
力控与位控
常见传统的工业机器人一般都是使用位置控制,即仅闭环控制机械臂末端笛卡尔空间或轴空间的位置轨迹,力矩控制(阻抗控制)即是在位置闭环控制的基础上,再引入阻抗控制,去调制机械臂输出力与位置之间的关系。
在很多非结构化的柔性生产领域,如打磨、柔性插拔等操作需要机械臂拥有良好的力控性能,同时也能够避免人机交互中的安全事故发生。
相关概念:阻抗控制 导纳控制 力-位混合控制
推荐阅读:阻抗-导纳控制最强解析