1.1.3 机器人技术的发展历程
(1) 想象阶段
机器人一词,最早出现在科幻和文学作品中。1920年捷克作家Karel Capek发表了科幻剧本《罗萨姆的万能机器人》。剧中叙述了一个叫罗萨姆的公司把机器人作为人类生产的工业品推向市场,让它充当劳动力代替人类劳动的故事。在剧本中,卡佩克把捷克语中奴隶一词“Robota”写成了“Robot”。
小说《罗萨姆的万能机器人》
美国著名科幻小说家、文学评论家阿西莫夫在1942年提出的"机器人学三定律"被称为"现代机器人学的基石"。
- 机器人不应伤害人,也不得见人受到伤害而袖手旁观;
- 机器人应遵守一切命令,但不得违反第一定律;
- 机器人应保护自身的安全,但不得违反第一、第二定律。
(2) 从梦想走进现实
机器人从幻想世界真正走向现实世界是从自动化生产和科学研究的发展需要出发的。1939年美国纽约世博会上展出了西屋电气公司制造的家用机器人Elektro。但它只是掌握了简单的语言,能行走、抽烟,并不能代替人类做家务。
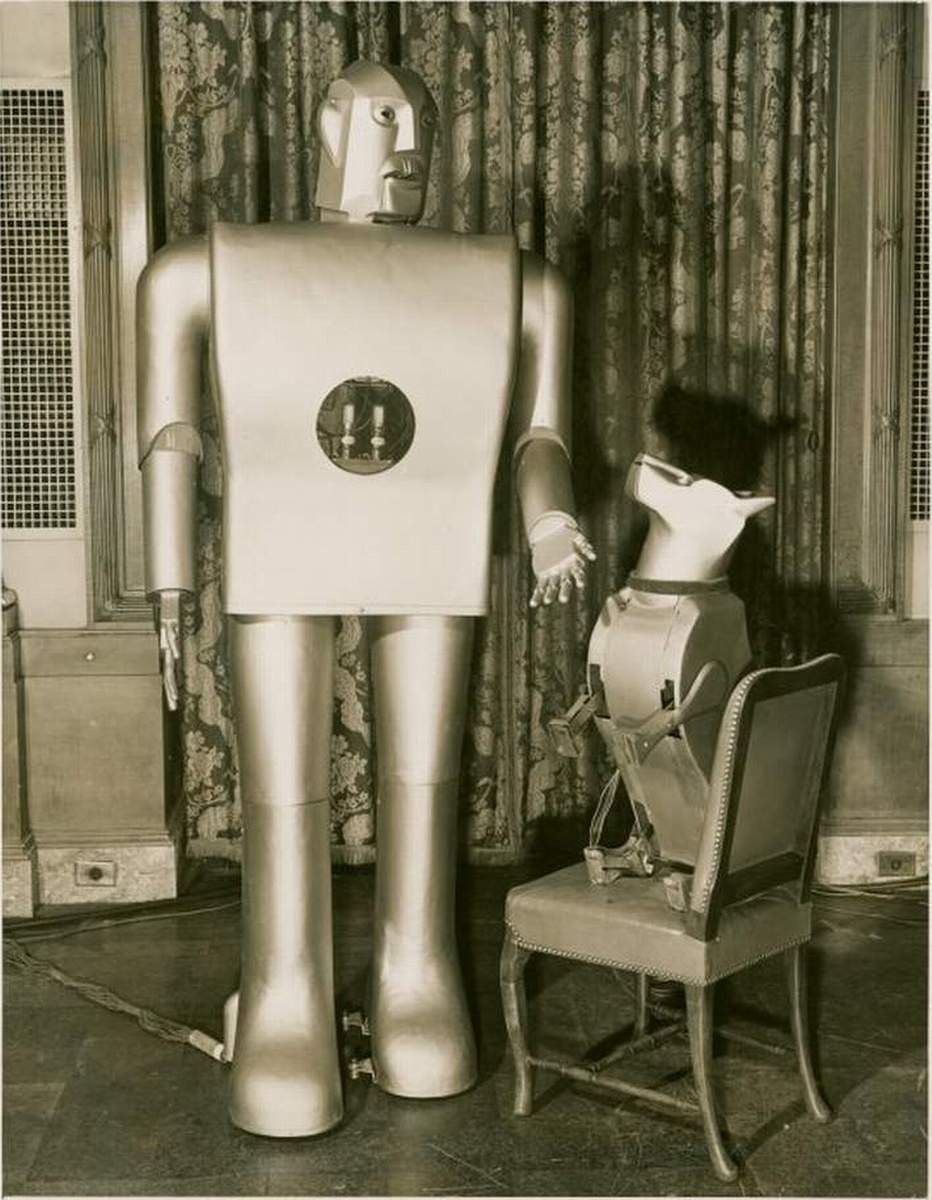
Elektro机器人
(3) 理论基础
1947年10月,维纳写出划时代的著作 《控制论》,1948年出版。书中揭示了机器中的通信和控制机能与人的神经、感觉机能的共同规律,为现代科学技术研究提供了崭新的科学方法。
(4) 实用化阶段
现代机器人的起源则始于二十世纪40-50年代(得益于1947年计算机的发明),美国许多国家实验室进行了机器人方面的初步探索。20世纪50年代以后,机器人进入了实用化阶段。1954年,美国的George Devol设计并制作了世界上第一台机器人实验装置,发表了《适用于重复作业的通用性工业机器人》一文,并获得了专利。
(5) 机器人技术的形成与发展
1960年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人UniMate。随后,成立了世界上第一家机器人制造工厂——Unimation公司。由于英格伯格对工业机器人的研发和宣传,他也被称为“工业机器人之父”。

第一代Unimate机器人
1965年,MIT演示了第一个具有视觉传感器的、能识别与定位简单积木的机器人系统;1969年:日本早稻田大学加藤一郎实验室研发出第一台以双脚走路的机器人。1970年:在美国召开了第一届国际工业机器人学术会议。自此以后,机器人技术发展为专门的学科。
(6) 机器人在工业界的普及
1978年:美国Unimation公司推出通用工业机器人PUMA。

PUMA机器人
80年代以后,随着计算机、传感器技术的发展,机器人技术已经具备了初步的感知、反馈能力。工业机器人首先在汽车制造业的流水线生产中开始大规模应用,随后,诸如日本、德国等制造业发达国家开始在其他工业生产中大量采用机器人作业。
(7) 从工业走进生活与智能化发展
20世纪80年代以后,机器人由自动化朝着越来越智能的方向发展,其特征是拥有各种传感器,并且在处理单元中融合处理传感信息,能够有效适应环境变化,具有很强的自适应能力、学习能力和自治功能。 智能机器人的发展主要经历了三个阶段,分别是可编程试教、再现型机器人,有感知能力和自适应能力的机器人,智能(智慧)机器人。
1984年,英格伯格创建了TRC公司,研发服务机器人。1988年,TRC公司推出了世界第一个服务业机器人HelpMate,用来在医院走廊穿行,为病人送饭、送药,并记录病人的情况。

TRC的医疗服务机器人HelpMate
1999年 日本索尼公司推出犬型机器人爱宝(AIBO),从此娱乐机器人成为机器人迈进普通家庭的途径之一。2003年 SONY推出世界上第一台会跑的人形机器人(QRIO)。2007年,Aldebaran Robotics公司的 NAO 机器人在RoboCup替代AIBO,成为当时学术领域世界范围内运用最广泛的类人机器人。

AIBO陪伴机器狗与NAO人形机器人
进入21世纪后,随着劳动力成本的不断提高、技术的不断进步,各国陆续进行制造业的转型与升级,出现了机器人替代人的热潮。服务型机器人大力发展,最典型的例子便是走入千家万户的圆饼状的扫地机器人。

扫地机器人
如今,随着传感器技术的发展,嵌入式硬件成本的降低以及计算机图像处理技术和人工智能的发展,机器人向智能化发展的门槛逐渐降低,在与以前相同成本下可以追求机器人更高性能的表现。当今社会希望机器人可以从事高重复性工作、高危环境作业以及其他人工难以触及的特种操作,如采矿、化工、金属冶炼等领域的特殊作业,以降低社会成本,增加人们的幸福感。在社会服务、医疗领域,机器人也将充当重要角色,如大大降低医疗手术难度的达芬奇手术机器人。



手术机器人Davinci、采矿机器人Robominer、桥梁巡检机器人“探索者”