1.2.3 仿生足式机器人
人类以及一些高等哺乳动物在大自然上亿年的洗礼中,进化出了腿足这种适应性极高的运动形式。比起轮式机器人,足式机器人对非结构化地面环境有更好的适应能力,无论是四条腿的机器狗还是两条腿的仿人机器人,这种足式构型配合多传感器以及更加复杂的控制算法,能够实现更广泛地形的运动能力。
四足机器人



来自BD的Spot,Anybotics的Anymal,宇树Unitree的Go1 Pro
了解更多
- Boston Dynamics: https://www.bostondynamics.com/
- Anybotics: https://www.anybotics.com/
- Unitree: https://www.unitree.com/
四足机器人的结构组成
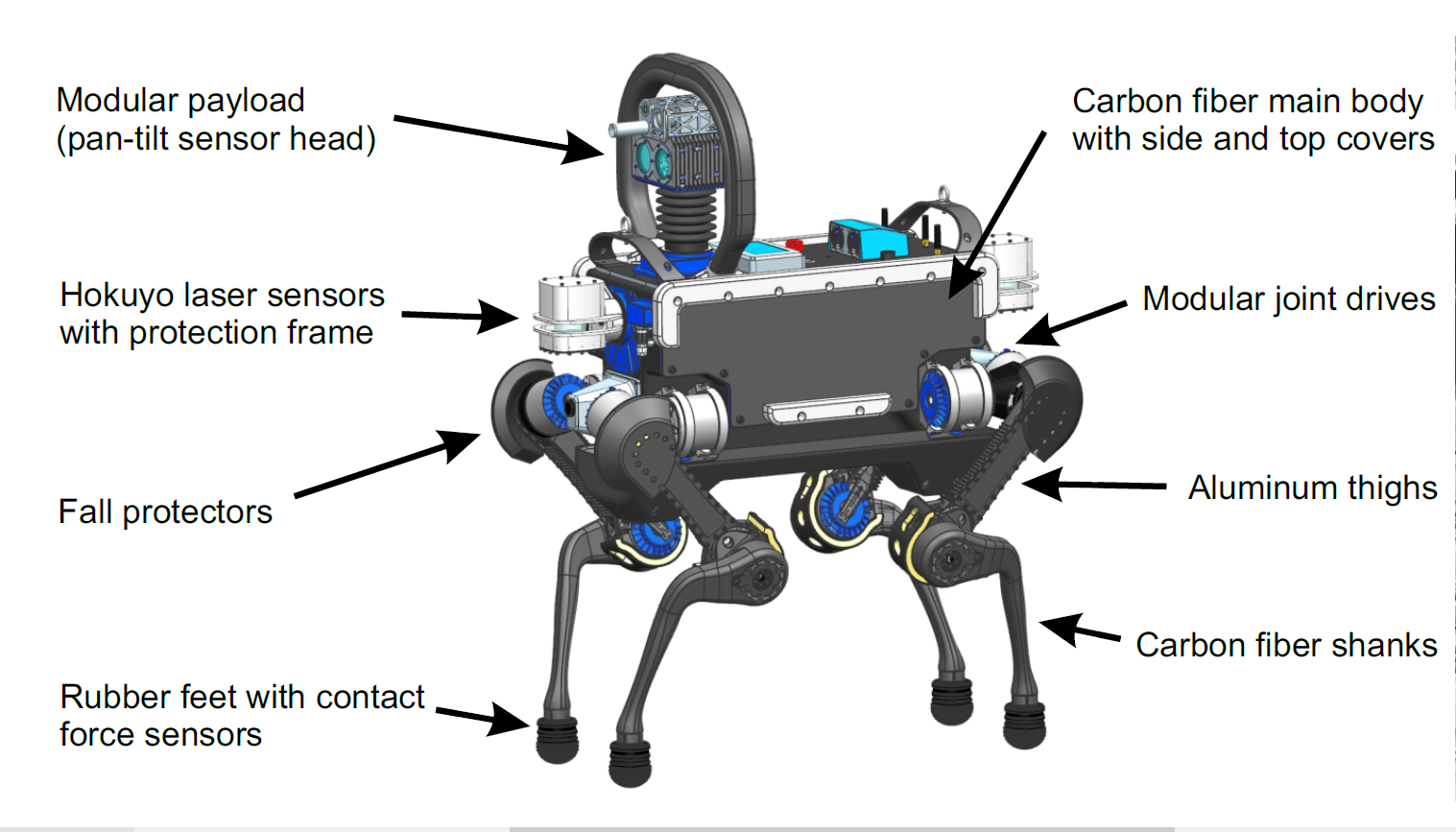
Anymal的结构组成
-
驱动关节:Anymal的驱动单元Anydrive采用了SEA(串联弹性驱动器)的方案。一共12个包含电机本体、减速器、SEA弹性元件以及编码器一体驱动器集成的关节驱动模组。
-
机身本体:碳纤维的机身、小腿以及铝合金大腿,承担机身载荷。
-
感知单元:足端力传感器;深度相机/激光雷达。
-
计算控制单元:机身内部的小型计算机。
四足腿部结构设计案例
Mini Cheetah
Spot
人形机器人
人形机器人发展至今,想要完美代替人类完成工作还是比较困难的。工业机械臂从发展初期到成熟应用于工业界花了30年的时间,相比之下,复杂度远远更高的人形机器人想要走到成熟应用的一步,就需要花费更长的时间。
相比四足机器人,人形机器人的关节驱动要求就要高得多。对机器人来说,尺寸越大,对关节驱动的要求就更高,实现同样的运动就更困难,这就是所谓的“尺寸效应”。机器人尺度扩大λ倍,质量就会扩大λ3倍,加上运动尺度本身的扩大,那么所需求的运动扭矩就是λ4量级的。然而就永磁体+线圈式的电机驱动器而言,尺度的扩大仅仅能够带来λ^2级别的扭矩输出。这样随着尺度的增大,驱动器的能力会越来越跟不上输出需求的能力。 这也就是为什么小型机器人往往可以获得更高的功率密度。
因此相比最常见的电机驱动的方案,液压的方案可能更易于驱动大尺度的人形机器人关节。比如BD的Atlas,就是液压驱动的关节方案。另外也有一些人形机器人采取了液压-电机混合驱动方式。
推荐阅读: 知乎专栏:腿足式机器人的机电系统实现,任赜宇
(学习专业工程师的经验分享,对于机器人机电系统学习来说有很高的参考价值)